Holding Time Maximization Preserving Output Perormance for Timed Event Graphs
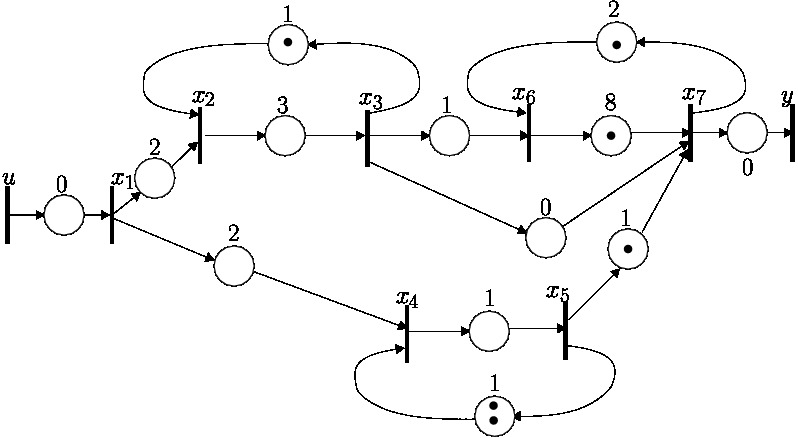
The considered TEG is represented on the figure below:
The state-space model of the previous TEG in Maxin[[γ,δ]] is:
|
A=
|
B=
|
C=
| | | ε | ε | ε | ε | ε | ε | e | | |
After holding time maximization, the modified TEG is represented on the figure below:
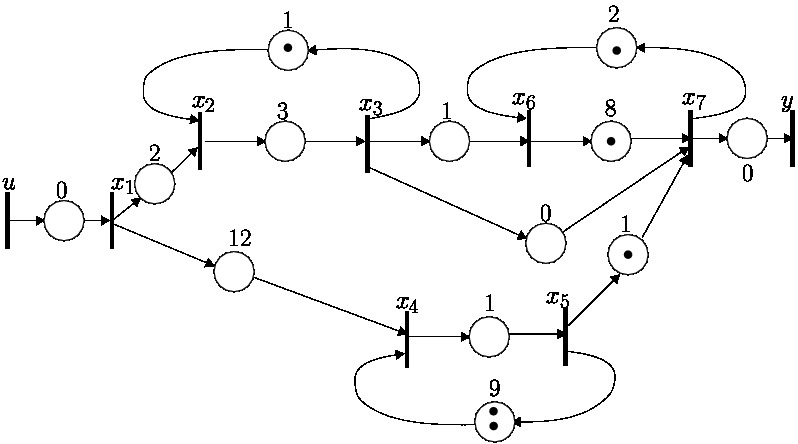
The state-matrix Aopt of the modfied system is:
Aopt = PrγA(CA*\CA*) =
| | | ε | ε | ε | ε | ε | ε | ε | | |
| | | δ2 | ε | γδ | ε | ε | ε | ε | | |
| | | ε | δ3 | ε | ε | ε | ε | ε | | |
| | | δ12 | ε | ε | ε | γ2δ9 | ε | ε | | |
| | | ε | ε | ε | δ | ε | ε | ε | | |
| | | ε | ε | δ | ε | ε | ε | γδ2 | | |
| | | ε | ε | e | ε | γδ | γδ8 | ε | | |
Code Source of the example considered :
|
The software is the library Minmaxgd extended with the γ-projection along a series. The following file contains the extended library and the implementation of the examples of the paper: HolTMax.zip Original library is available here : Minmaxgd |
|
Date : December 15th, 2012 |