Notre Projet
-
PRESENTATION
Durant notre 2ème année du cycle d'ingénieur à l'ISTIA , école d’ingénieur de l’université d’Angers,
nous avons réalisé un projet tout au long de notre second semestre.
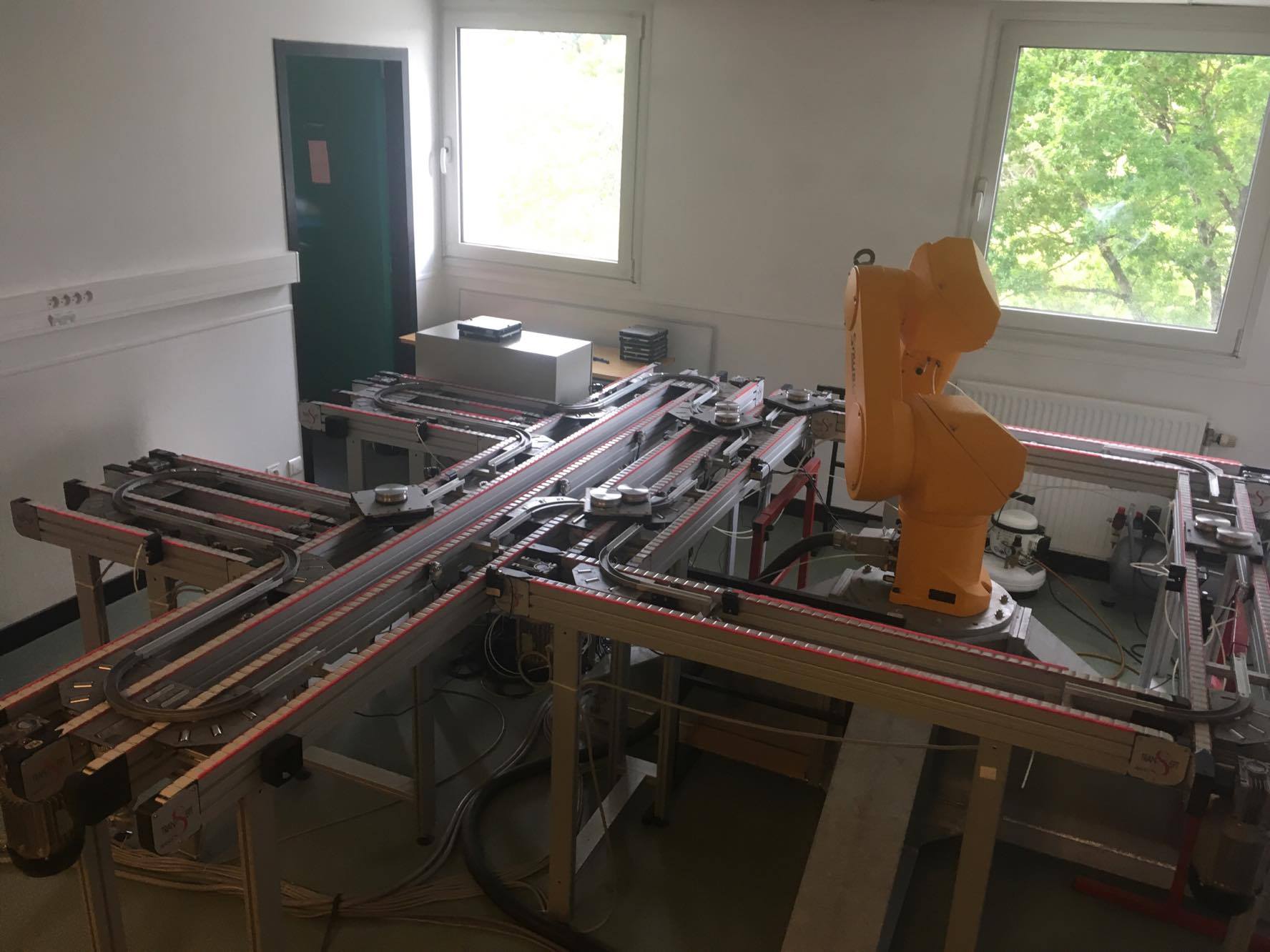
Ce projet consistait à automatiser un système transitique avec un robot Stäubli ainsi qu'une supervision afin de reproduire au plus proche le travail que nous pourrions réaliser plus tard en entreprise.
Un système client/serveur est chargé de collecter les données du système via les automates et est chargé de renseigner une base de données (BDD) MySQL.
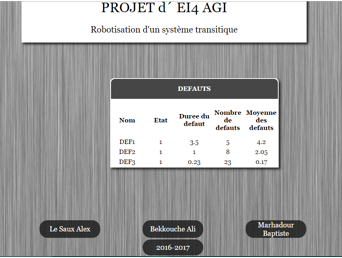
Les données sont récupérées par un site web permettant, d'une façon plus visuelle, d'observer les informations du système (état des capteurs, des défauts ou du robot).
-
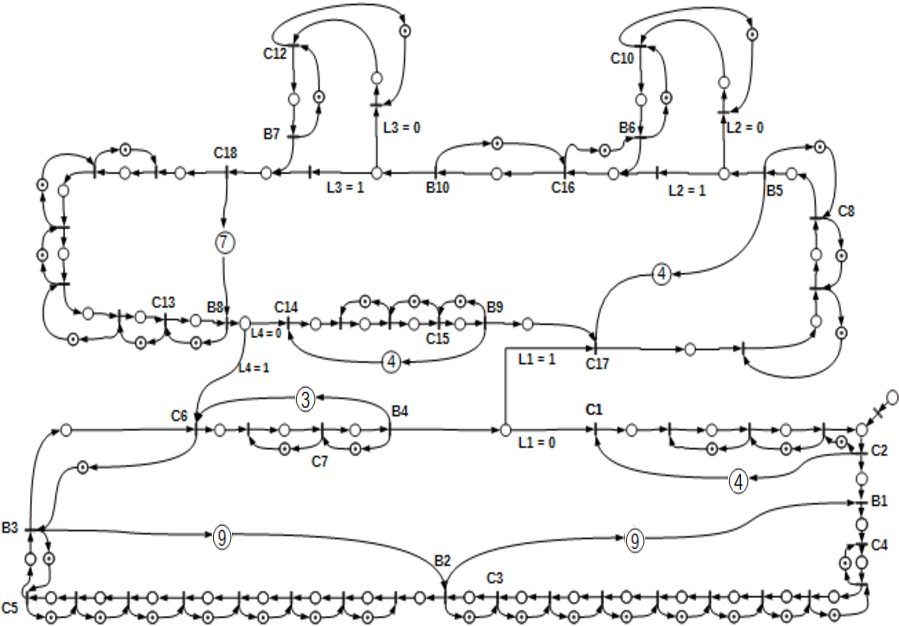
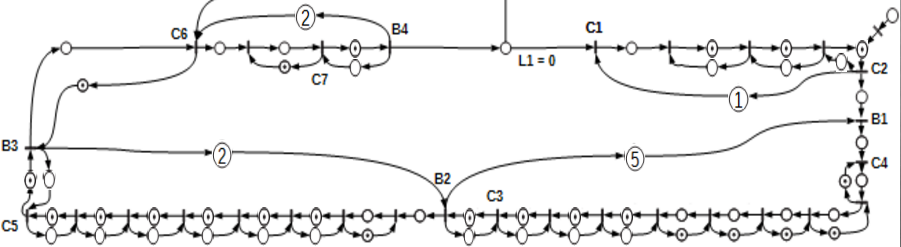
LA PROGRAMMATION DES AUTOMATES
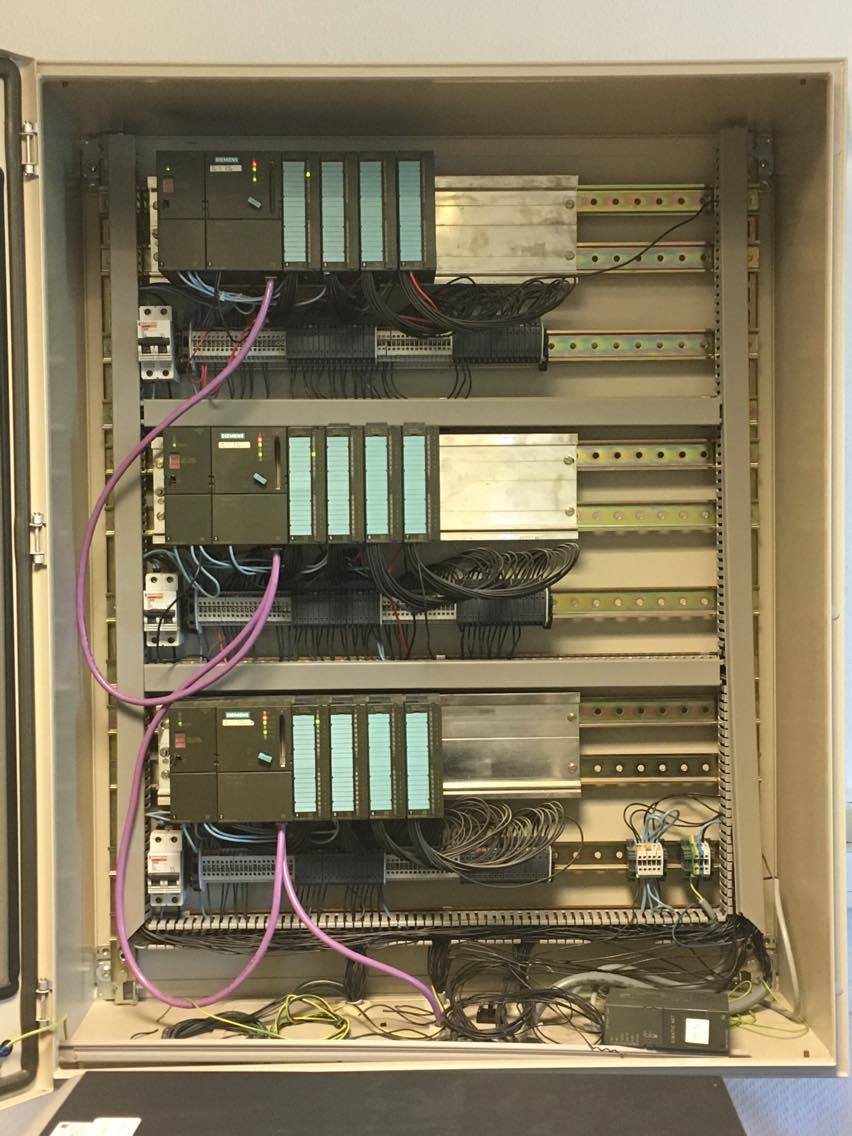
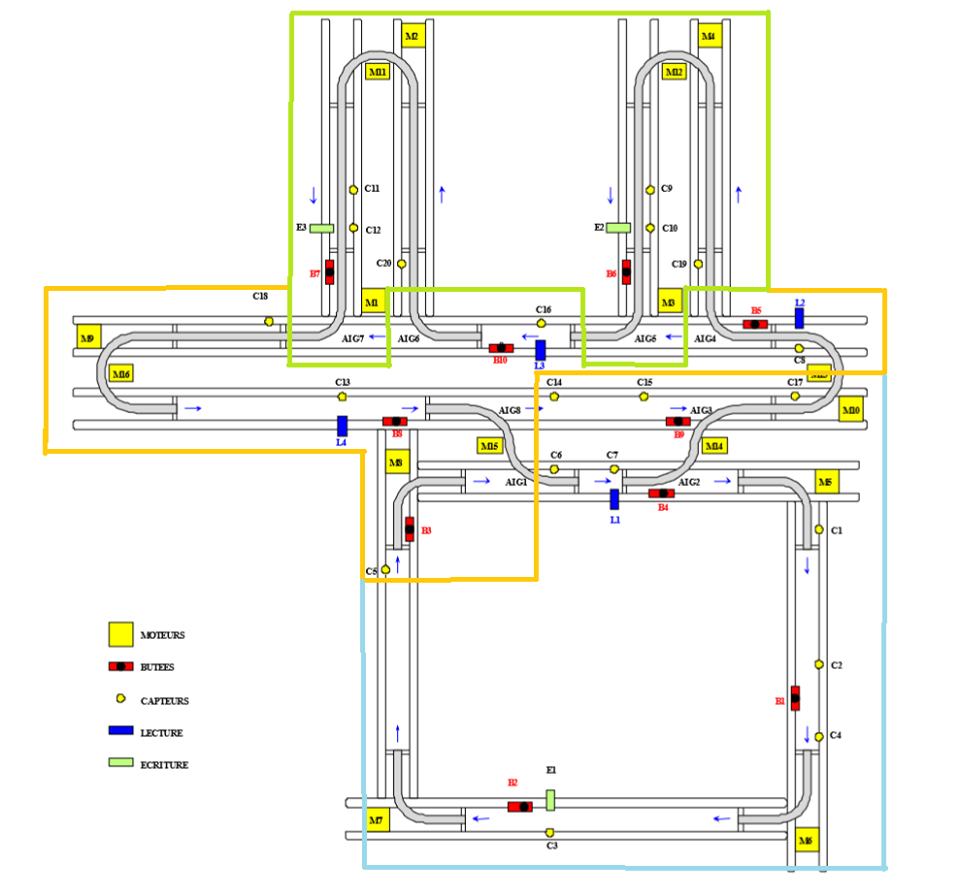
La maquette est composée des trois automates Siemens. Les capteurs et actionneurs du système sont reliés sur ces automates.
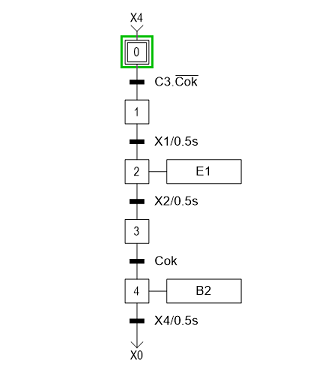
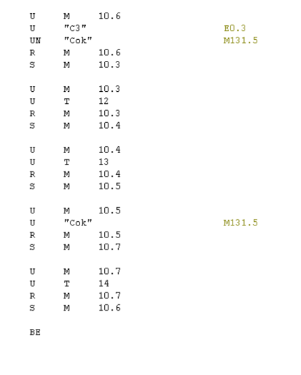
Pour réaliser les programmes nous avons d'abord fait des GRAFCETs pour ensuite les retranscrire en LIST. Les capteurs et les actionneurs sont reliés sur les trois automates de telle sorte qu'il faut utiliser une communication réseau avec la méthode des sémaphores. Nous avons aussi programmé l'activation des défauts via les automates.
-
-
-
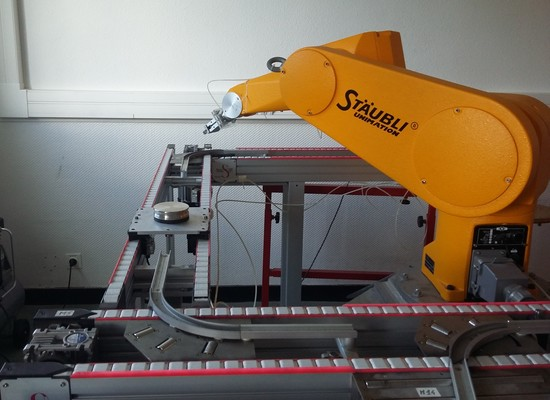
LE ROBOT
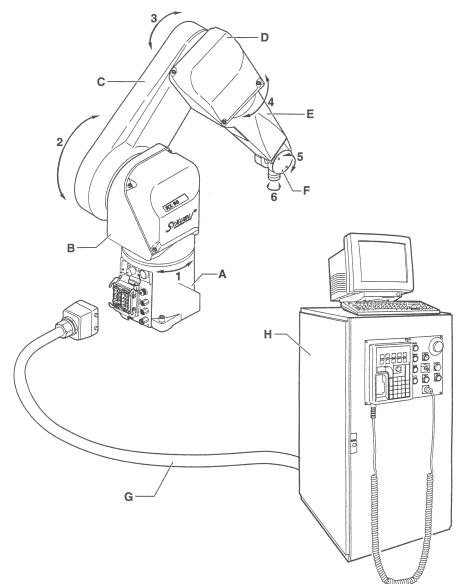
Le robot intégré à la ligne transitique est un Stäubli RX 90, utilisé en industrie pour des opérations de haute précision.
Il est composé d’un bras polyarticulé détenant 6 degrés de liberté, relié à un poste comportant un ordinateur ainsi qu’une baie de commande. La fonction du robot était de simuler le chargement et le déchargement de palettes du convoyeur.
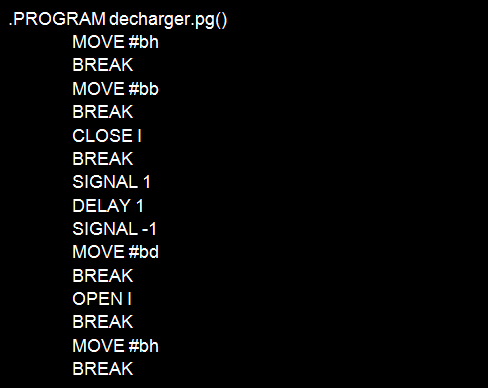
Sa programmation se fait en deux temps. D'abord, nous manipulons manuellement le robot pour le mettre à des "points de passage" et enregistrons ceux-ci, puis nous écrivons des programmes qui permettent au robot d'aller automatiquement d'une position à une autre et de communiquer avec l'automate.
-
-
-
-
-
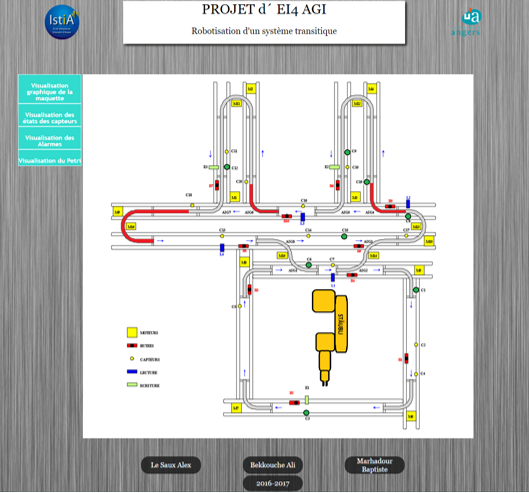
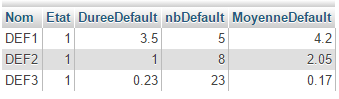
LA SUPERVISION
Pour ce projet nous avons réalisé une supervision qui consistait à relever l’état de tous les éléments de la maquette. Pour transmettre les informations de la maquette au site web, nous avons tout d’abord créé une base de données. Pour la compléter, nous avons réalisé un programme en C et nous avons fait les différentes pages du site en HTML et PHP.
-
-
-
-
VIDEO
Ci-dessous vous pouvez visualiser des videos du fonctionnement de notre projet.
-
-
-





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}