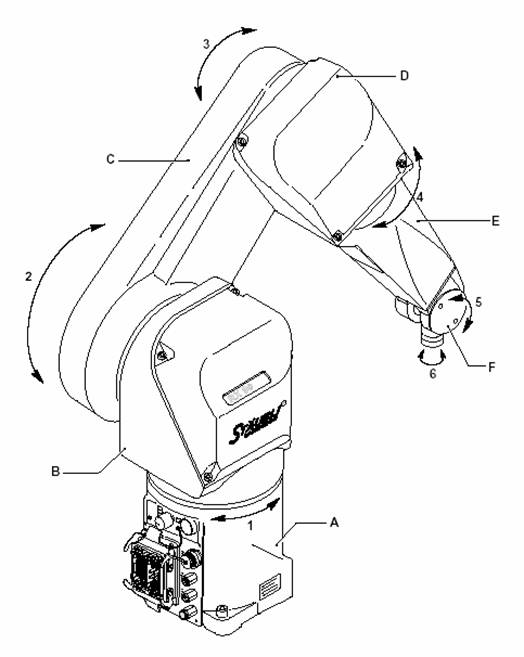
Le robot RX 90 est un robot polyarticulé à 6 degrés de liberté. Il est composé d’une baie de commande avec un écran et d’un bras mécanique qui sont liés grâce à un câble. Sur la baie, il y a un pendant qui nous permet de diriger le robot pour créer des points ou des trajectoires.
Ce robot possède trois modes de déplacement, un mode où les coordonnées du robot dépendent de l’outil (mode tool), un mode où les coordonnées sont rapportées au pied du robot (mode world) et un mode où les déplacements se font autour des 6 axes en même temps (mode joint).
Pour utiliser le robot, nous avons d’abord créé des points à l’aide du pendant puis, nous avons utilisé ces points dans un programme écrit en langage V+.