ERICA
Évaluation d'un Robot pour l'Imagerie et la CAractérisation environnementale en serre, volet acquisition et traitement de données
- Janvier 2025 – janvier 2026
- Type de financement et budget :
- Appel à Manifestation d'Intérêt SFR QuaSaV et SFR MathSTIC
- Financement demandé : 9000 €
- Responsable scientifique pour le LARIS : Rémy Guyonneau
- Collaboration avec:
- IRHS (équipes Phenotic, ImHorPhen et Emersys)
- UP Ephor
- Objectifs scientifiques et/ou techniques :
- Réaliser des caractérisations spatio-temporelles de la serre SF en utilisant un robot, capable d'embarquer des capteurs de température, d'hygrométrie, de rayonnement et des caméras.
- Pour le LARI: conception et réalisation du robot
ROMULUX v2
Robot mesurant des lux
- Septembre 2024 – Septembre 2026
- Type de financement et budget :
- MPIA (Maturation de projets Innovants en Anjou – 2019)
- Budget total : 148.420 k€
- Financement demandé : 148.420 k€
- Responsable scientifique pour le LARIS : Rémy Guyonneau
- Collaboration avec:
- La SATT Ouest Valorisation (porteur du projet)
- Le Cerema
- Objectifs scientifiques et/ou techniques :
- Programmation d’un robot pour la cartographie de luminosité indoor/outdoor
- Transfert public/privé

ROMULUX
Robot mesurant des lux
- Septembre 2019 – Septembre 2020
- Type de financement et budget :
- MPIA (Maturation de projets Innovants en Anjou – 2019)
- Budget total : 102 k€
- Financement demandé : 23.37 k€
- Responsable scientifique pour le LARIS : Rémy Guyonneau
- Collaboration avec:
- Le Cerema (porteur du projet)
- Objectifs scientifiques et/ou techniques :
- Réalisation d’un robot pour la cartographie de luminosité indoor/outdoor
- Transfert public/privé
Article - Robotic system for indoor illuminance map generation
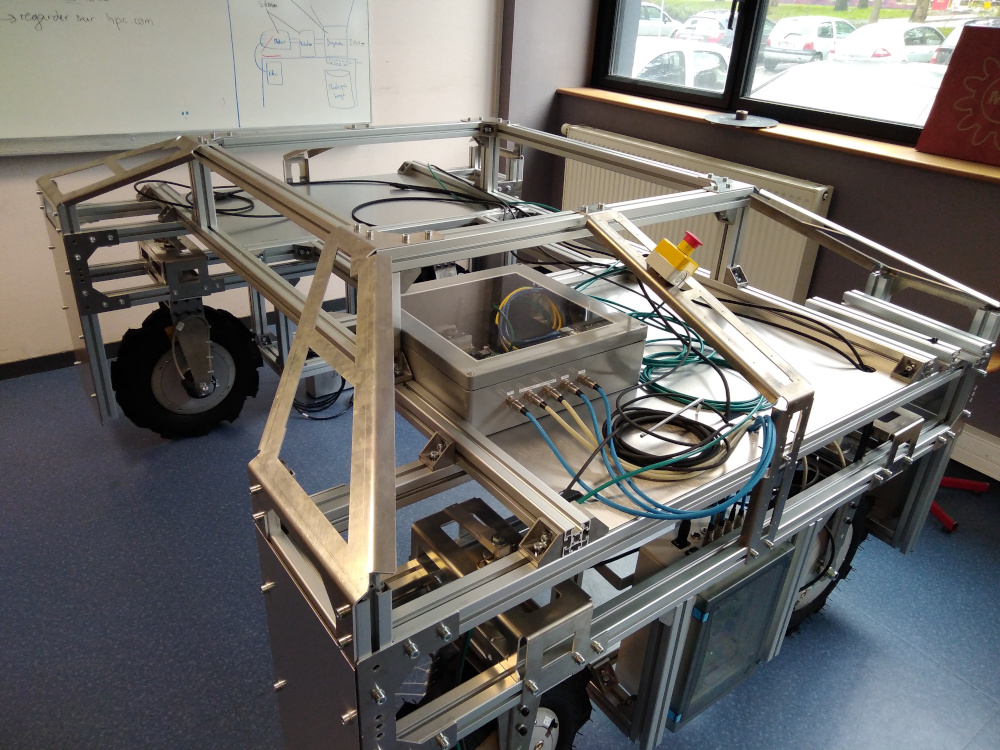
ENGRAIS
Plateforme expérimentale pour la navigation (autonome) d’un robot agricole symétrique
- Décembre 2018 – Décembre 2020
- Type de financement et budget :
- RFI Atlanstic 2020 (Preuve de Concept)
- Budget total : 215 k€
- Financement demandé : 83.7 k€
- Pilote, responsable scientifique pour le LARIS : Rémy Guyonneau
- Collaboration avec:
- Entreprise ez-Wheel
- Équipe ISISV (LARIS)
- Objectifs scientifiques et/ou techniques :
- Réalisation d’un robot agricole dédié à l’expérimentation
- Développement d’une approche de navigation autonome de suivi de rangs
Présentation Désherb'expo 2018
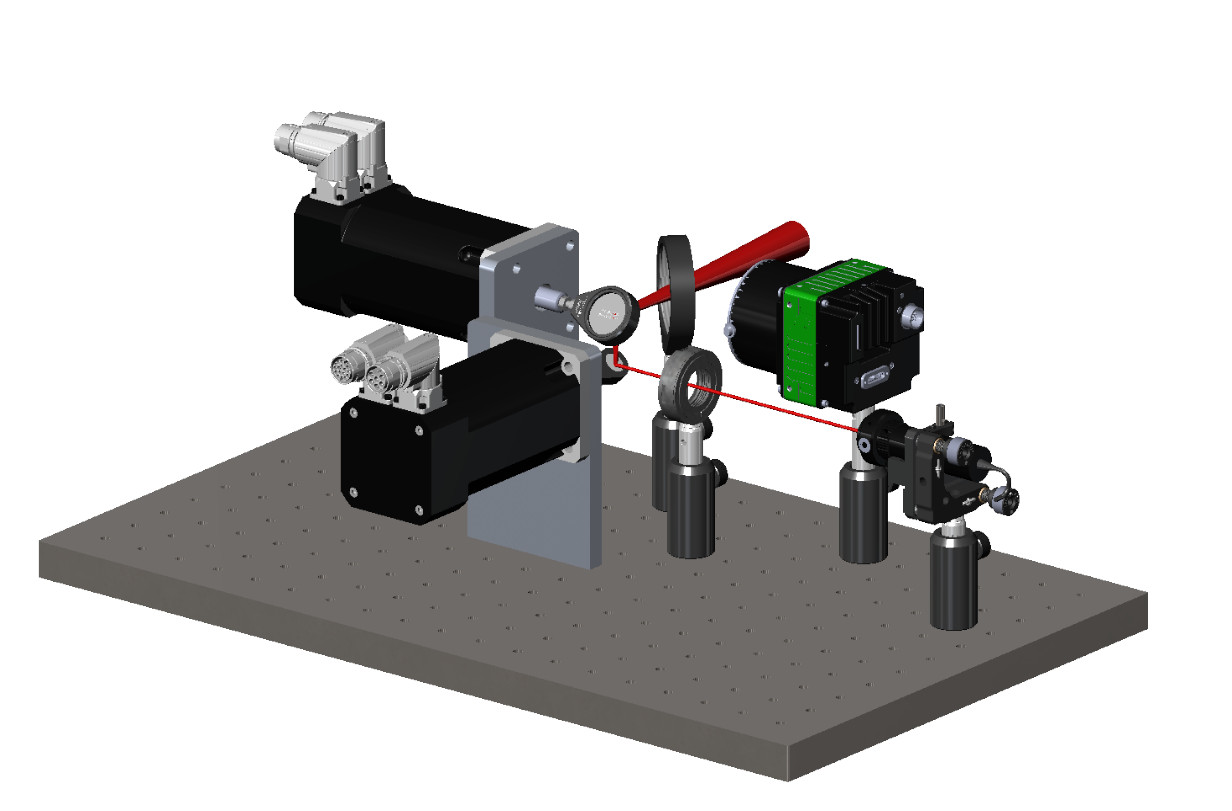
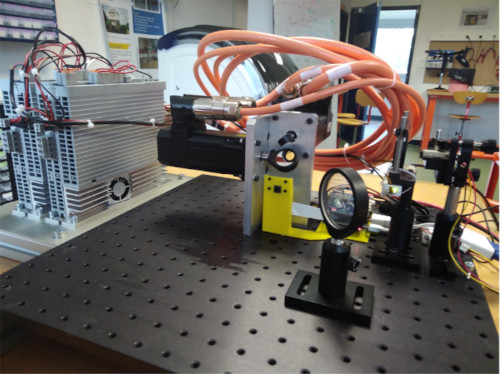
POODLE
PrOtOtype de Désherbage LasEr
- Juillet 2017 - Juillet 2019
- Type de financement et budget :
- RFI Atlanstic 2020 (Amorçage)
- Financement demandé : 9 k€
- Pilote, responsable scientifique pour le LARIS : Rémy Guyonneau
- Collaboration avec:
- Équipe SAMSON (MolTech Anjou)
- Équipe ISISV (LARIS)
- Objectifs scientifiques et/ou techniques :
- Réalisation d'un prototype de pointage laser
- Réalisation d'un prototype d'actionneur laser
- Tests de l'effet du laser sur les plantes

PUMAGri
Platefrome universelle pour le désherbage sous différentes conditions
- Octobre 2015 - 2018
- Type de financement et budget :
- FUI
- Financement demandé (LARIS) : 100 k€
- Responsable scientifique pour l'équipe SDO du LARIS : Rémy Guyonneau
- Collaboration avec:
- SITIA (porteur du projet)
- Équipe ISISV (LARIS)
- Objectifs scientifiques et/ou techniques (pour le LARIS):
- Développements d'algorithmes pour la détection d'adventices en culture dense

DRUMS
Robot pour le désherbage et la récolte de cultures maraîchères
- Avril 2015 - Septembre 2016
- Type de financement et budget :
- Commission Recherche (Université d’Angers) 2015
- Budget total : 25 k€
- Financement demandé : 25 k€
- Pilote, responsable scientifique pour le LARIS : Rémy Guyonneau
- Collaboration avec:
- Équipe ISISV (LARIS)
- Objectifs scientifiques et/ou techniques :
- Instrumentation du robot Oz (Naïo Technologies)
- Développement d’un algorithme de navigation en plein champ
- Traitement d’images pour l’identification d’adventices
Vidéo - Run 1
Vidéo - Run 2
