The considered TEG is represented on the figure below:
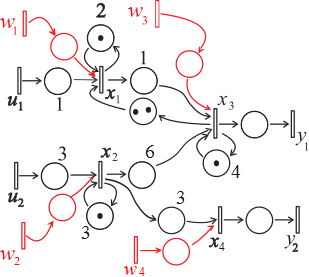
The state-space model of the previous TEG in Maxin[[γ,δ]] is:
|
A=
|
B=
|
C=
| | | ε | ε | e | ε | | |
| | | ε | ε | ε | e | | |
Date : July 2th, 2015
Observer Based Controller for max-plus linear systems
An extended version with the full development of the example is available here : IEEE_AC_Extended.pdf
The source code is available here : ObserverBasedControllerIEEETACHardoui6.cpp
To execute you need to download and deflate the : libminmaxgdObserverBasedController.zip and to consider the workingexample folder, see Readme.txt
|
A=
|
B=
|
C=
| | | ε | ε | e | ε | | |
| | | ε | ε | ε | e | | |