Réalisation:
Benjamin CASSARD
Zakaria IAZ
Sebastien CATEAU
Nassim MASMMOUDI

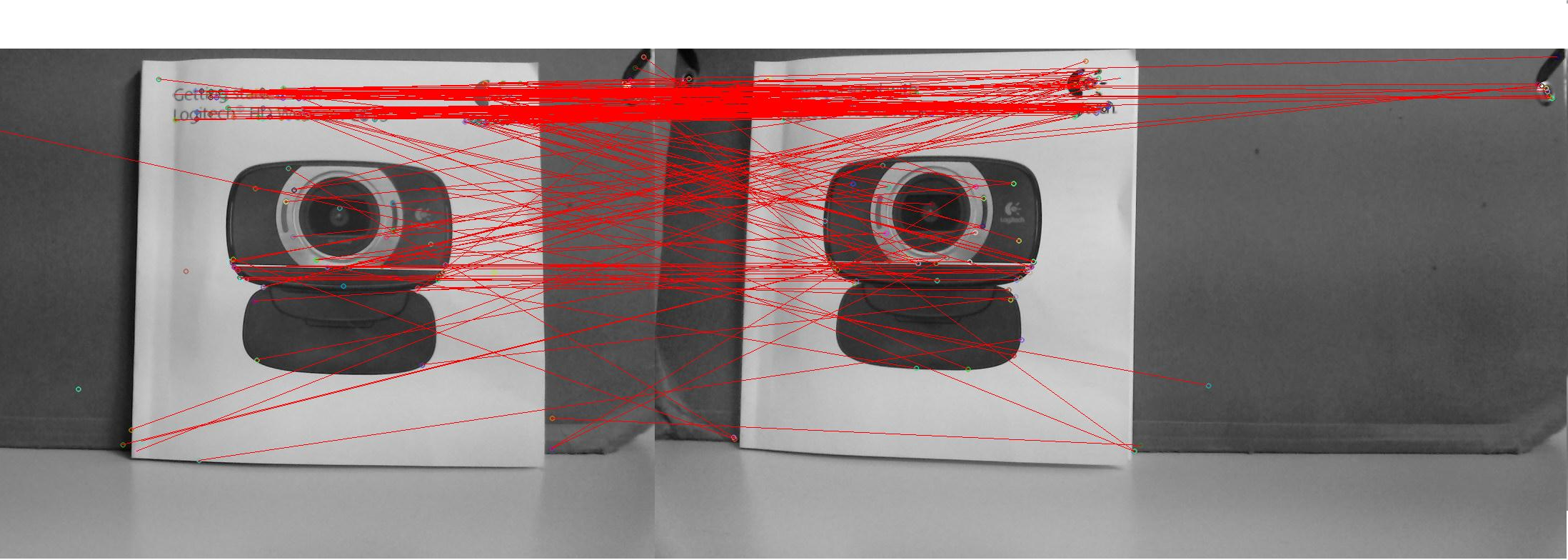
Le traitement d’image est une partie très importante du projet, les images sont enregistrées puis traitées afin de tirer
au mieux les informations qui nous sont utiles. Certaines étapes de nos programmes ont nécessité une conversion de l’image en niveaux de gris
afin d’optimiser les temps de calcul mais la partie la plus conséquente du traitement d’image dans notre projet se matérialise par la fonction de matching.
C’est cette fonction qui permet de faire le lien entre l’image de base de l’objet de référence et la nouvelle image.
Elle est conçue de façon à reconnaître les points-clés de l’objet de référence (le support) et de les retrouver dans n’importe
qu’elle image afin de les associer.
|
Nous avons précédemment mis en correspondance les points de deux images grâce au match_twosided. Nous avons donc une relation d'un plan à l'autre telle p α H q,
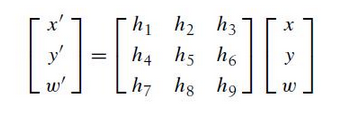
le but est de pouvoir en tirer l’homographie H pour ensuite l’appliquer à notre objet virtuel.Une homographie est une transformation projective 2D qui fait
correspondre les points dans un plan à l'autre. Dans notre cas, les plans sont des images ou des surfaces planes en 3D. L’homographie peut être utilisée dans différents
cas tels que l'enregistrement des images, la rectification des images, de la texture de déformation, la création de panoramas.
Soit x’ = H x, voici la représentation classique de cette homographie:
|
Une notion à bien comprendre dans notre projet est celle des différents mondes par lesquels nous passons.
Un point d’un objet réel possède des coordonnées dans un monde en 3 dimensions. Hors la caméra enregistre des images en 2 dimensions,
le programme récupère donc les coordonnées de l’objet en 2D. Les points sont ensuite projetés dans un environnement virtuel qui lui est en 3D.
Ce monde virtuel est ensuite reprojeté en 2D pour être affiché à l’écran.
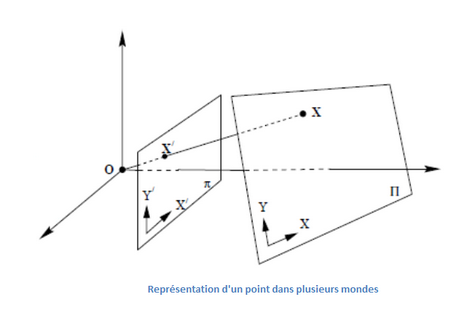 Pour passer d’un point en 3D du monde réel à sa projection dans notre environnement virtuel on a donc une première projection,
puis on applique la matrice homographie. Les 2 schémas ci-dessous résument ce principe :
Pour passer d’un point en 3D du monde réel à sa projection dans notre environnement virtuel on a donc une première projection,
puis on applique la matrice homographie. Les 2 schémas ci-dessous résument ce principe :
|
Benjamin CASSARD
Zakaria IAZ
Sebastien CATEAU
Nassim MASMMOUDI
M. Jean-Baptiste FASQUEL