Projet AGI Ei4 Année 2014-2015
Plateforme de réalité virtuelle pour la conception d’interacteurs et l’évaluation.
Contexte du projet:
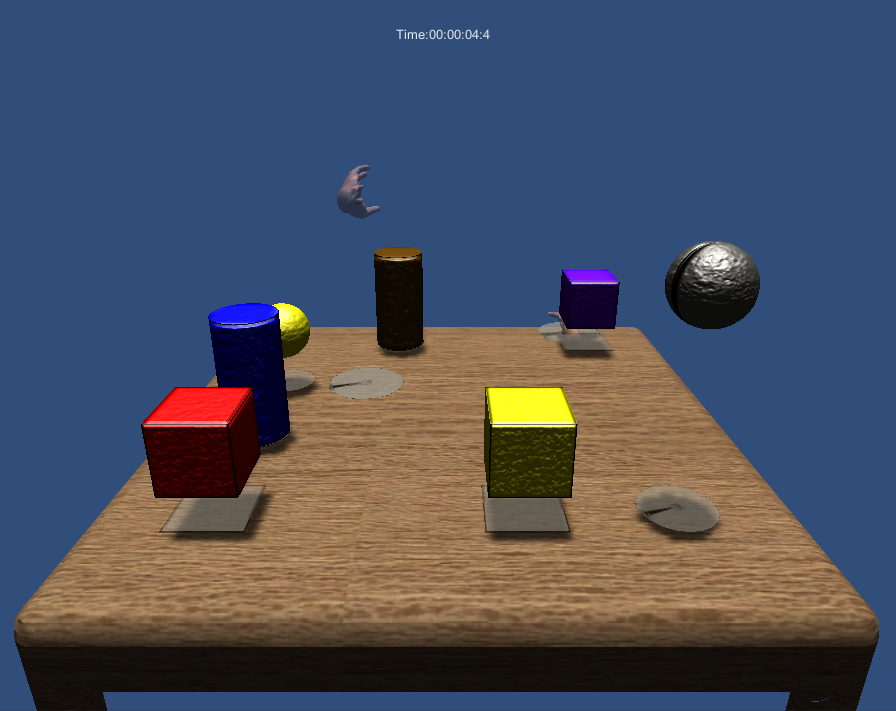
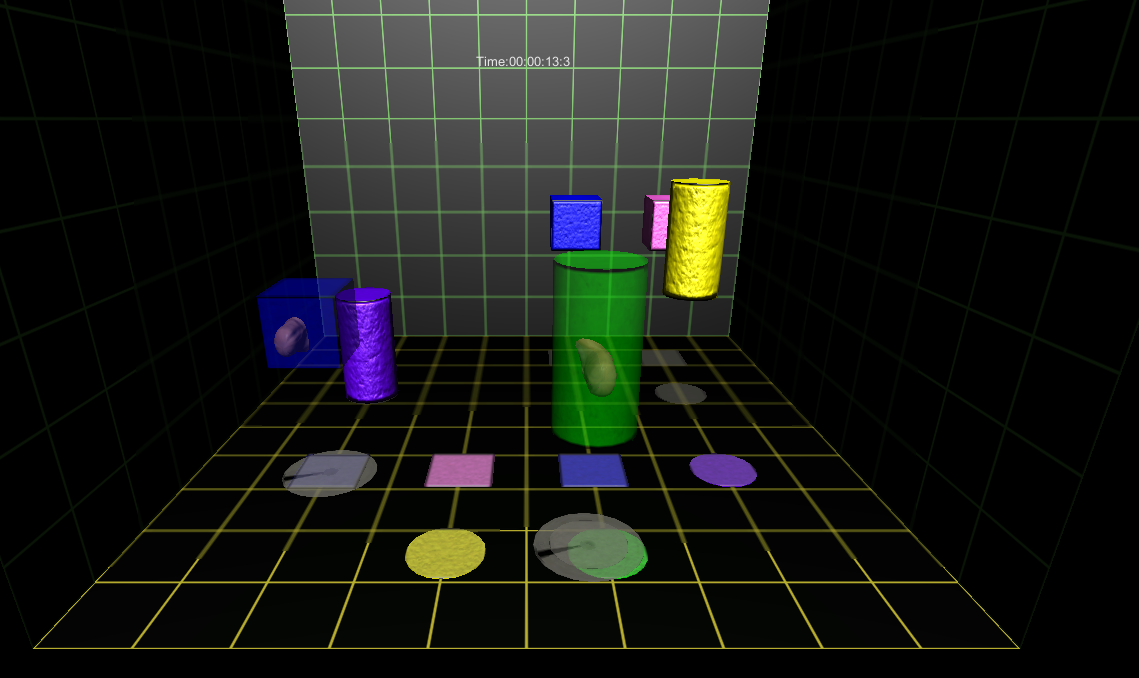
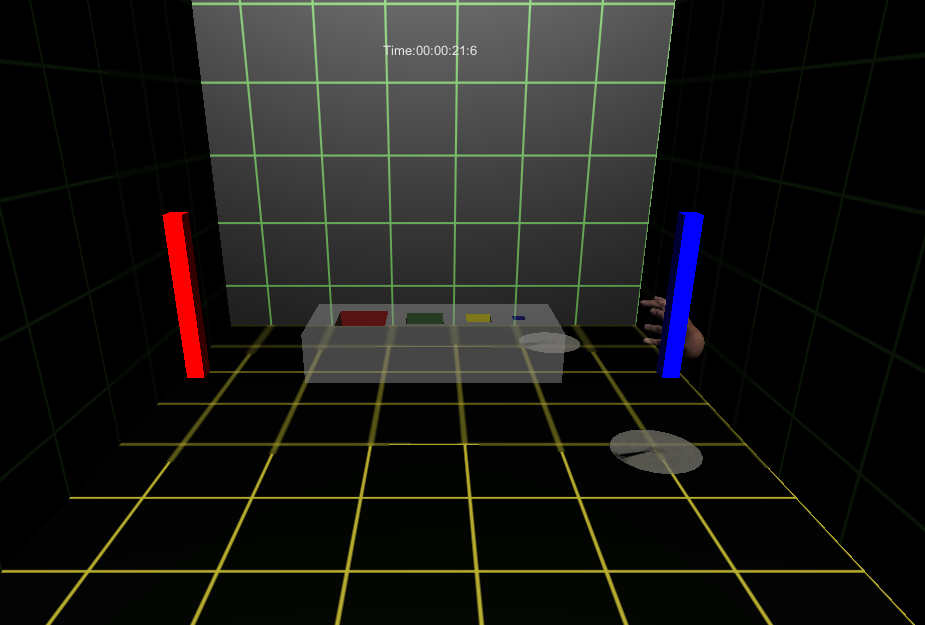
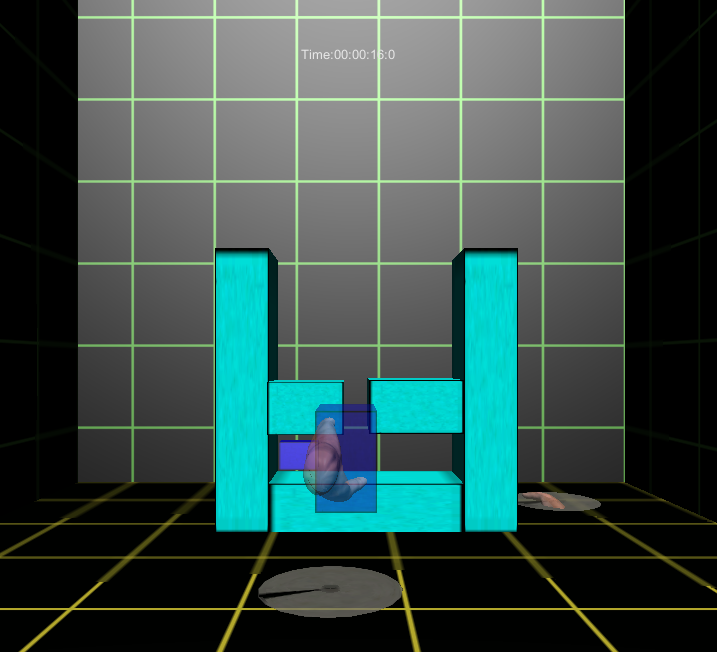
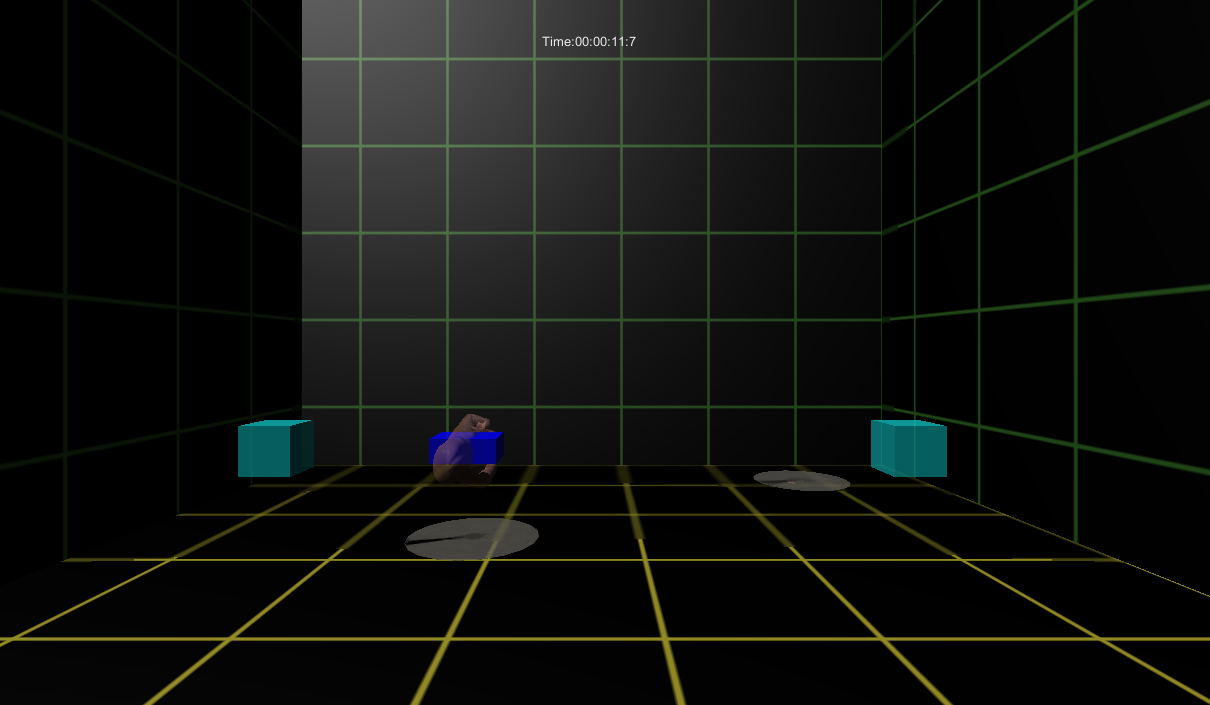
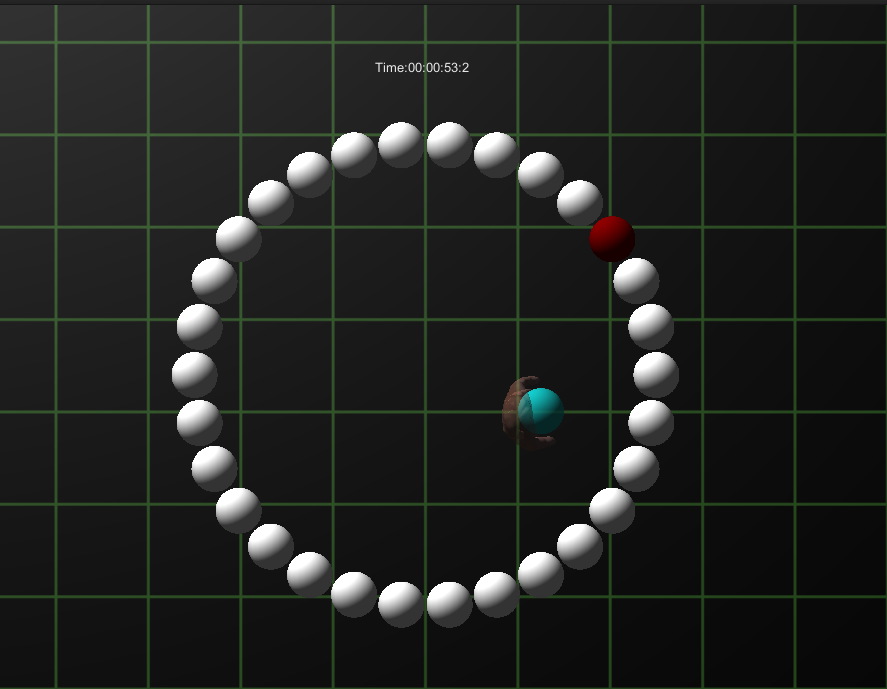
Lorsqu’un utilisateur effectue une tâche de manipulation en réalité virtuelle (RV), différentes techniques peuvent être proposées. Celles-ci sont basées sur une interface d’entrée (périphérique d’interaction) et un curseur (sphère, outil ou avatar), piloté par l’opérateur, qui va servir à effectuer les tâches envisagées. Différents capteurs et interfaces ont été développés ces dernières années, ouvrant la voie à de nouvelles possibilités d’interaction non-intrusives (Natural User Interfaces), bas coût , et d’enregistrement de données pendant l’interaction (données comportementales, physiologiques, etc.).
Objectifs:
L’objectif du projet est de contribuer au développement de la plate-forme en proposant de nouveaux modèles d’interaction et de nouvelles interfaces permettant la sélection et la manipulation d’objets virtuels. Les interfaces privilégiées sont la Kinect2, le LEAP motion et le Razer hydra. L’intégration de scènes / tâches nouvelles vous sera également demandée. Ce projet est développé en collaboration avec Jose Braz de l’Institut Polytechnique de Setubal (Portugal).