Le projet consiste à réaliser une maquette pédagogique représentative des systèmes de convoyage à espacement constant.
Il est très courant de rencontrer dans l'industrie ce type de dispositif permettant d'obtenir un espacement constant entre les pièces transportées.
L'objectif est de faciliter les traitements (tri, conditionnement, remplissage,...) en aval sur la ligne de production.
L’image ci-dessous représente une telle installation.
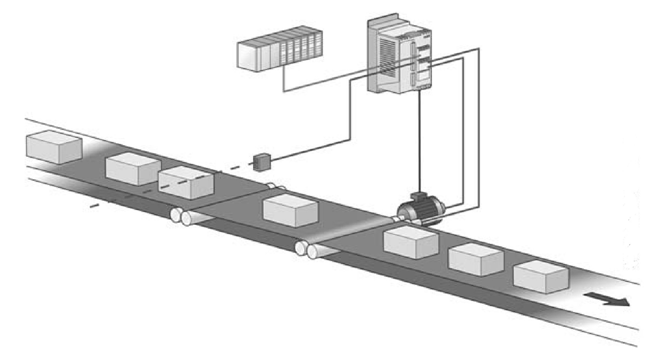
Une des difficultés dans ce type d’installation est que la vitesse du convoyeur final est généralement susceptible de varier.
Il est alors nécessaire de synchroniser et d’asservir la vitesse du convoyeur l'alimentant.
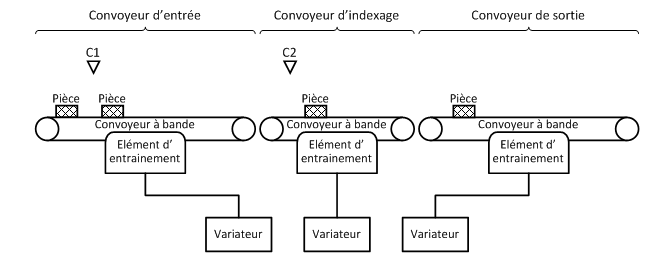
L’opérateur saisit la vitesse de cadencement du convoyeur de sortie, et l’espacement voulu entre chaque pièce via un terminal de dialogue (PC). Ces paramètres, définis par l’opérateur pourront être modifiés en cours du processus. Les vitesses des convoyeurs sont synchronisées. On mesure l’écart entre deux pièces sur les deux premiers tapis grâce aux capteurs C1 et C2. On compare cet écart à l’espacement saisi par l’opérateur. Les vitesses des deux premiers convoyeurs seront asservies pour ajuster les écarts d’espacement entre chaque pièce.